
Goal of the Electrical Team
The Electrical Team designed ARTEMIS to meet the electrical criteria outlined in the Design Specifications. The following list defines success for the electrical subsystems:
- Battery Life
- Battery Updates
- Control Range
- Latency
- Camera Resolution
- User Interface
1) Battery Life
ARTEMIS shall operate for 30 minutes and should operate for 2 hours in still water with 1/3 of the time at minimum speed while empty, 1/3 of the time at medium speed while half full, and 1/3 of the time at maximum speed while full. The goal of this specification is to quantify battery life for typical aquadrone usage which includes variable speed and variable trash volume. This specification was tested by attempting to drive ARTEMIS in the water at minimum speed for 10 minutes without a load, adding half the maximum volume of trash and running at medium speed for 10 more minutes, then adding the full volume of trash and running at maximum speed for the final 10 minutes. The battery lasted for 23 minutes. Supporting analysis concluded that 10 sets of 3 lithium ion cells (versus the current 2 sets of 3 lithium ion cells) in series per propeller would be required reach the 2-hour objective for battery life.
2) Battery Updates
The user shall receive an update on the battery voltage every 5 minutes and should receive an update on the battery voltage every 1 minute. The user should have regular updates on the battery voltage so that they can ensure they return the aquadrone to shore before the battery dies. This specification was tested by verifying that the recorded voltage matched the actual voltage using a multimeter, and using the timestamp to verify the battery update was sent each minute.
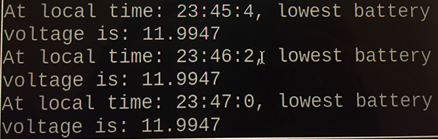
Example of the battery updates sent every minute while being viewed on the Raspberry Pi.
3) Control Range
ARTEMIS shall have a control range of 100m and should have a control range of 1km. Increasing the range is primarily reliant on more powerful and expensive transceivers, so 100m is a baseline threshold to prove the aquadrone can collect trash that is inaccessible from shore. The video range will be designed to be less than the control range so the user will lose their video feed and be motivated to return to range before the controls are lost, while battery updates should have the longest range to provide consistent data. This specification was tested by having one tester walk away with the transmitter from another tester with the receiver in clear, line-of-sight conditions. When the receiver stopped responding, the tester with the transmitter would move closer until the receiver responded to three trials at that given distance. The distance between the two testers was measured using Google Maps. The controls had a reliable range of 400 meters, the video had a reliable range of 100 meters, and the battery updates had a reliable range of 800 meters.
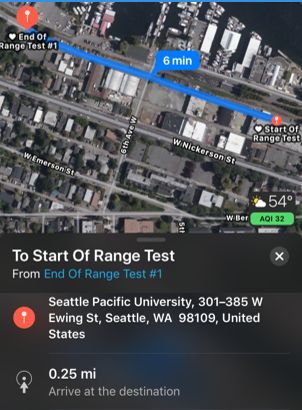
Results from the range test confirming the controls reliably communicated in a semi-obstructed urban area at a distance of 0.25 miles or approximately 400 meters.
4) Latency
The end-to-end latency of the camera to live video feed shall be less than 500ms, and should be less than 150ms. At the maximum speed of 2 knots, the aquadrone could travel approximately 0.5m in 500ms and can travel 0.15m in 150ms. Similar to the range, more expensive equipment can reduce the latency so the goal of 500ms is to prove the concept, while less than 150ms minimizes how much the aquadrone can change position in real-time before the user sees. This specification was tested by streaming live video of a computer clock with milliseconds and comparing the actual time with the displayed time. The end-to-end latency was 0 ms as shown in the 5 trials below.
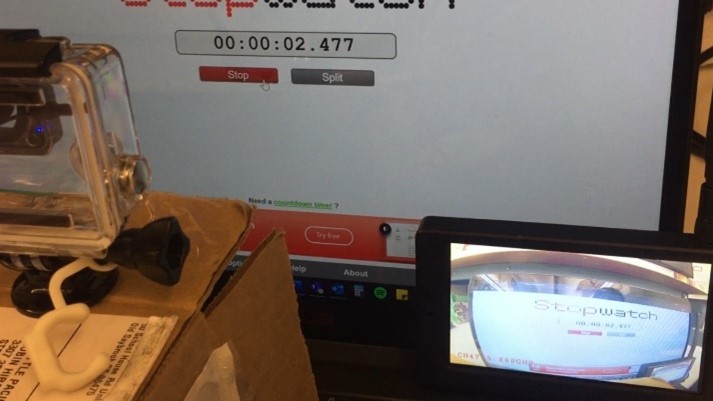
Screen Reads: 2.477 Seconds
Camera Reads: 2.477 Seconds
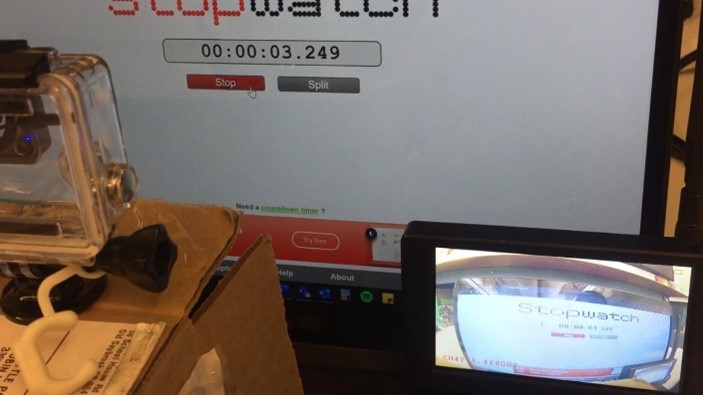
Screen Reads: 3.249 Seconds
Camera Reads: 3.249 Seconds
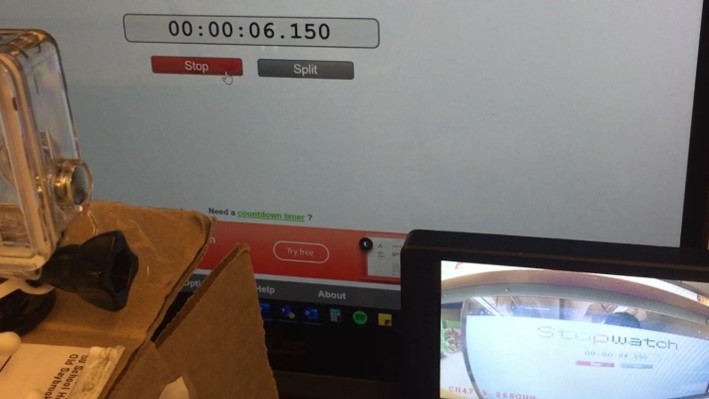
Screen Reads: 6.150 Seconds
Camera Reads: 6.150 Seconds
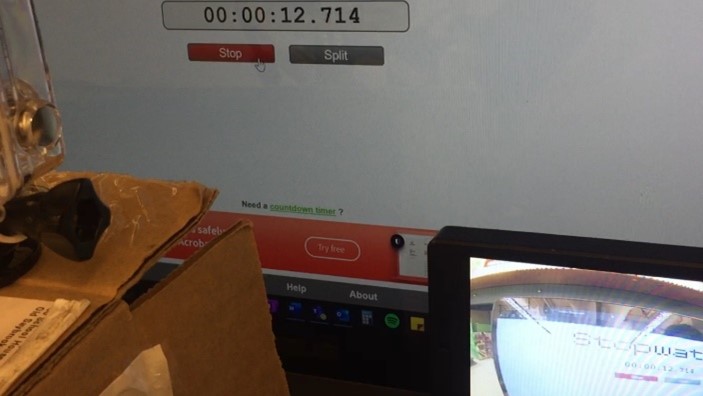
Screen Reads: 12.714 Seconds
Camera Reads: 12.714 Seconds
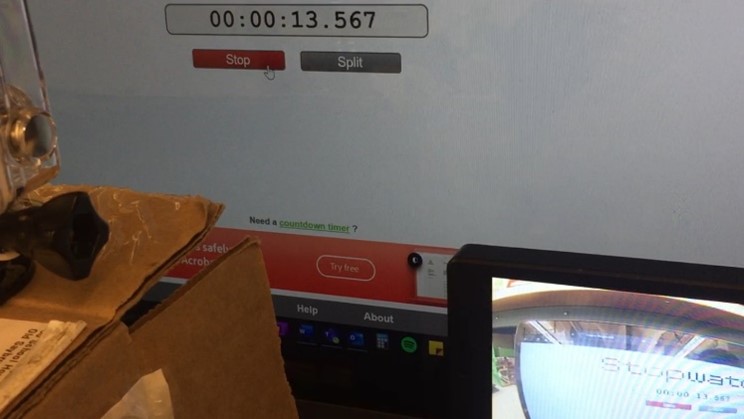
Screen Reads: 13.567 Seconds
Camera Reads: 13.567 Seconds
5) Camera Resolution
The camera shall allow a user to distinguish between a water bottle and piece of driftwood of the same length in open water from a distance of 5m, and should allow a user to distinguish between a water bottle and a piece of driftwood of the same length in open water from a distance of 30m. A user will need to distinguish trash from natural features in the environment to make decisions about what to collect. 5 meters will allow the user to identify trash immediately surrounding the aquadrone before collection, while 30m will allow the user to seek out and maneuver the aquadrone to new collections of trash. This specification was tested by placing a water bottle and a piece of driftwood in the water at a measured distance from the aquadrone at increments of 5 meters. A volunteer, who had not seen the placement of the items, was asked to look at the screen and identify the two items for four trials at each distance. The distance was increased until the volunteer was unable to distinguish between the two types of trash 75% of the time. The volunteer distinguished the water bottle from the driftwood 100% of the time from a distance of 5m away, 75% from a distance of 10m away, and under 75% over a distance of 10m (15m to 30m).

Driftwood and water bottle 5 meters away.

Driftwood and water bottle 10 meters away.
Driftwood and water bottle 30 meters away.
6) User Interface
The user shall be able to interface with the aquadrone using a total of 3 devices, and should be able to interface with the aquadrone using a total of 1 device. The user will have three main data streams: control signals to the aquadrone, live video from the aquadrone, and battery updates from the aquadrone. A single device for all three data streams will be the most user friendly. This specification was tested by counting the number of devices required to interface with the aquadrone as shown below.

UI Device #1: Controller (joystick and transceiver)

UI Device #2: Video receiver and display
UI Device #3: Computer or phone for accessing website