We are Team Morpheus! Welcome to our project, we are designing a middle market alternative to a standard hook hand with is on the lower end of cost and an alternative to a full customized hand specifically made for a certain individual which is on the higher end of cost.
Just a little background information about the team, we are comprised of our electrical engineers Joe Haj and Eric Helke, and our mechanical engineers Kelvin Por, Matthew Wolf, and Sean Liu. We are all seniors at Seattle Pacific University and this is our capstone design project.
We chose to build the Morpheus Hand as we saw in the market, there is no middle option in terms of prosthetic hands. Amputations are a subject that is often not talked about because unless you have one, you wouldn’t understand what it feels like. Amputations are a life changing event whether it comes from a birth defect, an accident, or infections/disease, it really does effect a person’s life.
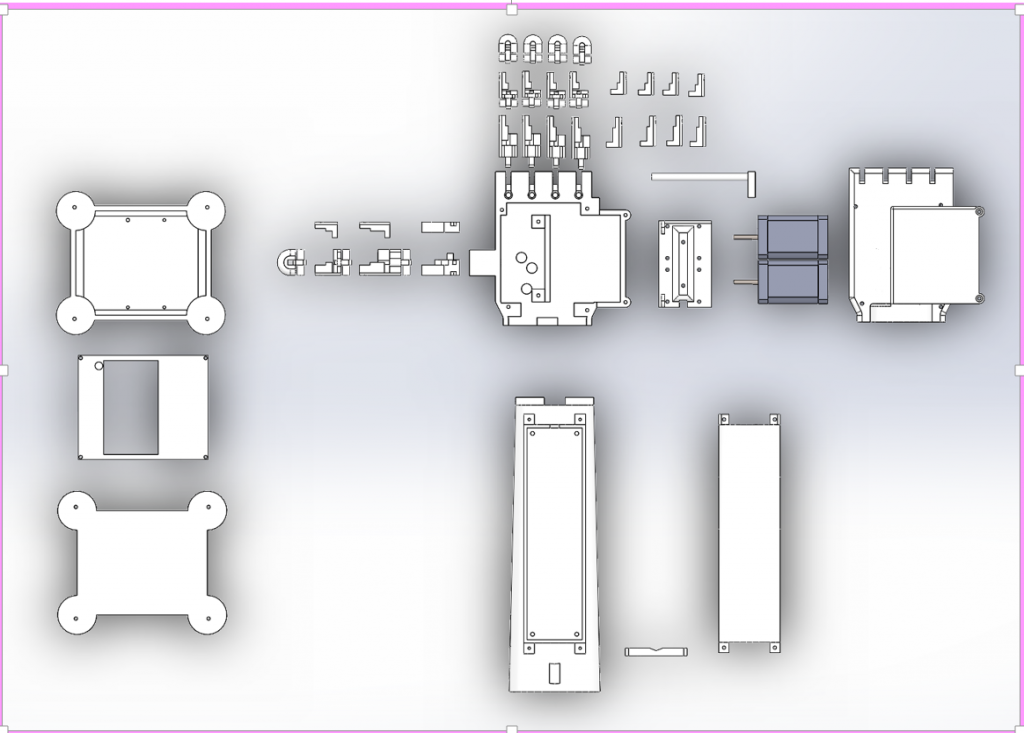
Figure 1 displays the mechanical design of the Morpheus Hand. One thing that we learned during the process of designing the hand, we learned that the human hand is a really complex and unique geometry and that it is something that cannot be easily replicated. What is not shown in the figure is that we replicated the tendons in a human hand with strings and rubber bands to replicate the opening and closing of hand. We also divided the fingers and thumb up to have metacarpals and distils much like how human fingers are not just one long bone to allow bending. Since we are building the hand out of plastic, there are limitations to much bend the hand will have but through testing, it has been proven that the hand is capable of grabbing and holding, and pinching as well which are two main functions that the normal human hand contains.
The unique features of the hand are that we are using EMG sensors on the user’s functioning arm and reading those muscles to send signals through a Bluetooth transmitter to a receiver on the prosthetic and creating the movement of the hand. This hand is able to grab, hold, and pinch onto items similarly to a human hand.
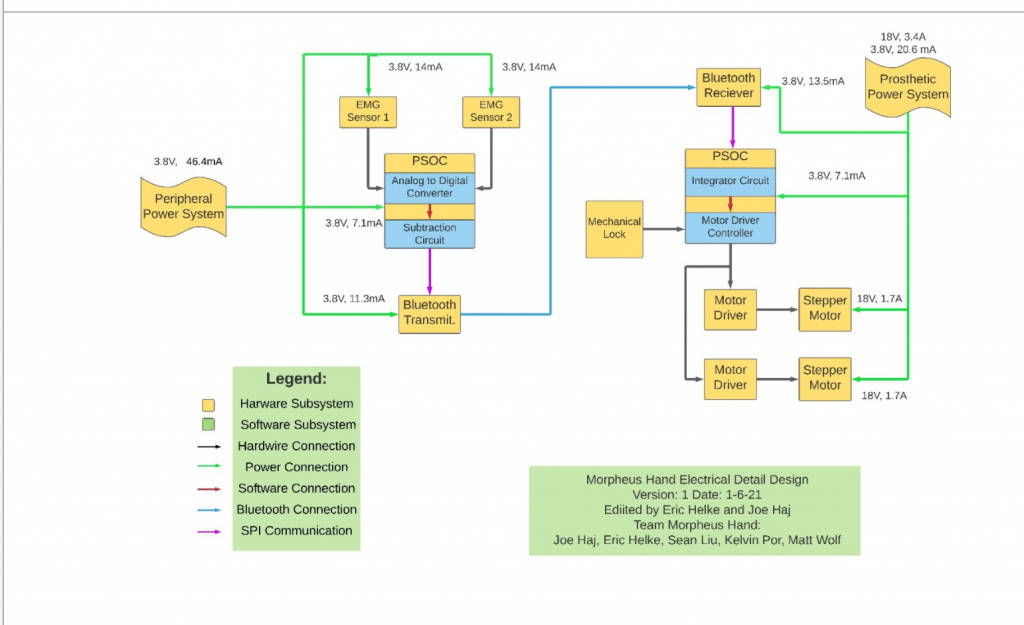
Figure 2 displays how the hardware is setup to power the hand. Another amazing feature of the Morpheus Hand is that it does not require a overall big battery to run the system and we managed to only have to use drill battery sized batteries to power the system. Another key electrical component we will have is an electromagnetic brake which will be controlled by a switch. This will allow the user to have their non amputated arm free and the brake will keep the system in tension and allow the user to have essentially two hands to use and operate.
The Morpheus Hand will allow the user to have a sense to have a hand again after unfortunately losing it. Which will give the user a sense of relief as they can somewhat function much like they did before.

Figure 4 Morpheus Hand
In the photo above includes all parts to the Morpheus Hand save for the electrical wires that connect them. In the left is the leather harness, and in the right going from top to bottom is the peripheral and battery holster, the sleeve, and the arm/hand assembly.