This page contains the source code for the RIM robotic arm. The code is split into three parts:
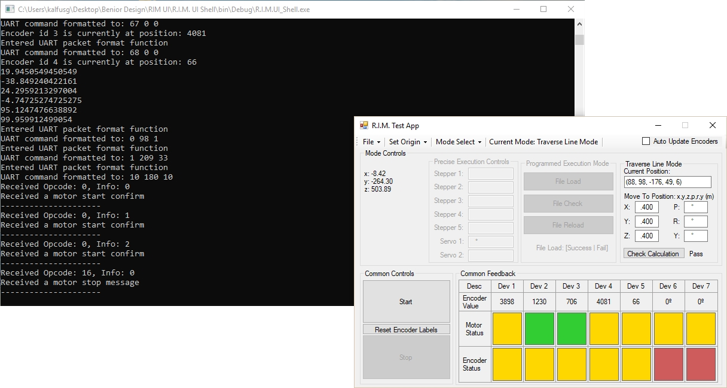
Provides the user with the ability to control RIM in various ways.
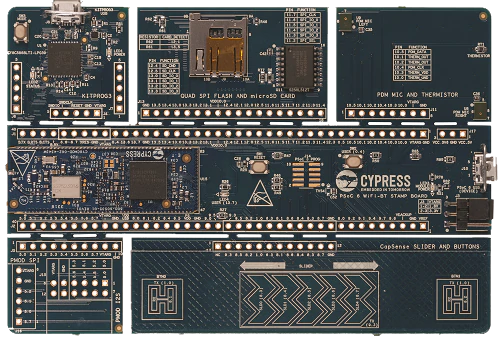
Runs on a PSoC 6 MCU. Executes commands sent from the UI (Moves the motor drivers, gets encoder information, etc).
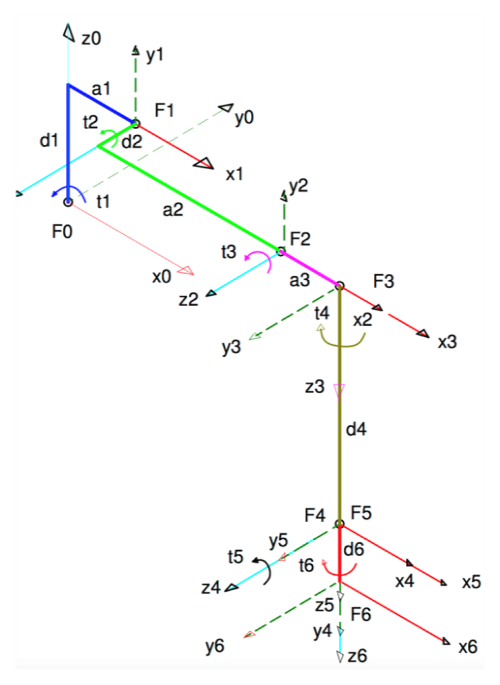
MATLAB scripts that allow the arm to position using forward and inverse kinematics.