Kinematic Calculations
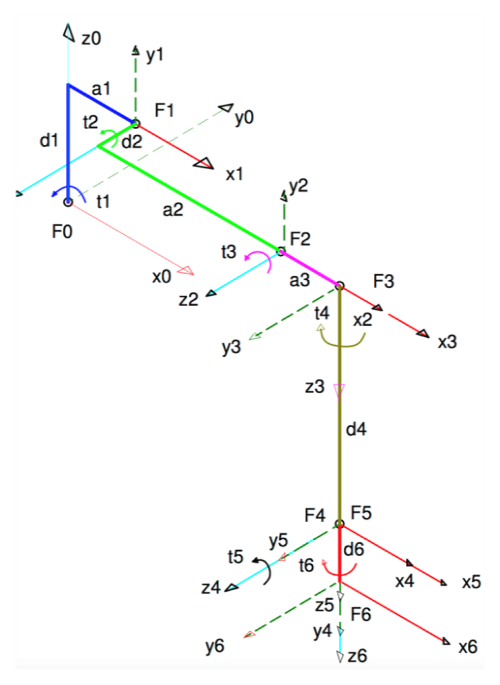
Forward kinematics allows for the calculation of an end-effector position based on known joint angles. Inverse kinematics allows for the calculation of joint angles based on a desired end-effector position in cartesian coordinates. Calculations were done in a series of MATLAB scripts using Denavit-Hartenberg reference parameters and using guidance from Professor Rudy du Preez’s paper on kinematics for robotic arms with six degrees of freedom. Photo credit to Rudy du Preez’s paper.
MATLAB Files: here